


Hay muchos servomotores disponibles en el mercado y cada uno tiene su propia especialidad y aplicaciones. Los siguientes dos párrafos lo ayudarán a identificar el tipo correcto de servomotor para su proyecto/sistema.
La mayoría de los servomotores de hobby funcionan de 4,8 V a 6,5 V, cuanto mayor sea el voltaje, mayor será el par que podemos lograr, pero lo más común es que funcionen a +5 V. Casi todos los servomotores de hobby pueden girar solo de 0° a 180° debido a su disposición de engranajes, así que asegúrese de que su proyecto pueda vivir con el semicírculo. Si no, puede preferir un motor de 0° a 360° o modificar el motor para hacer un círculo completo. Los engranajes de los motores se desgastan fácilmente, por lo que si su aplicación requiere motores más fuertes y de funcionamiento prolongado, puede usar engranajes metálicos o simplemente ceñirse a los engranajes de plástico normales.
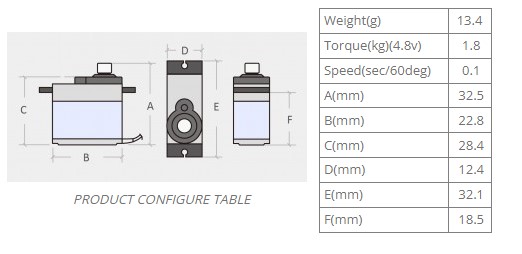
Luego viene el parámetro más importante, que es el par al que funciona el motor. Una vez más, hay muchas opciones aquí, pero la que está aquí es el par de torsión de 2,2 kg/cm que viene con el motor MG90. Este par de 2,2 kg/cm significa que el motor puede arrastrar un peso de 2,2 kg cuando está suspendido a una distancia de 1 cm. Entonces, si suspende la carga a 0,5 cm, el motor puede tirar de una carga de 4,4 kg. Según la carga que utilice en el proyecto, puede seleccionar el motor con el par adecuado. La siguiente imagen ilustrará lo mismo.
Cómo usar un servomotor
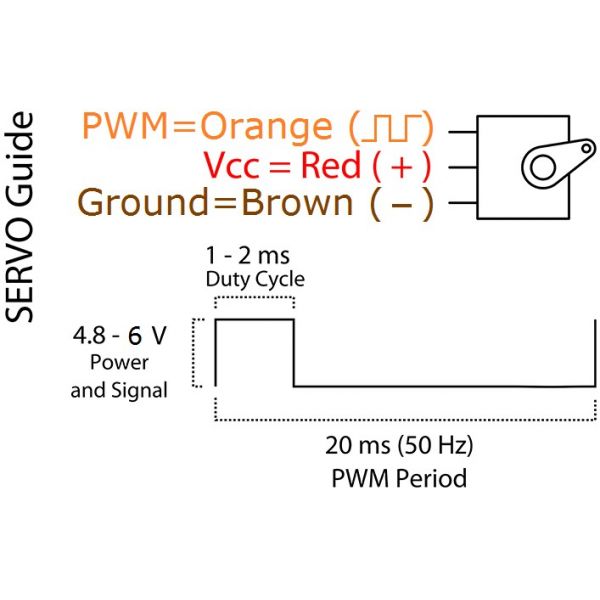
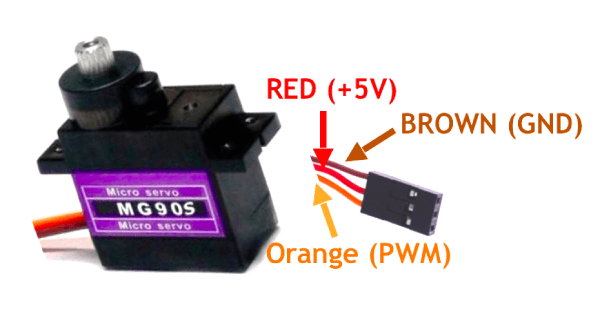
Después de seleccionar el servomotor adecuado para el proyecto, surge la pregunta de cómo usarlo. Como sabemos, hay tres cables que salen de este motor. La descripción de la misma se encuentra en la parte superior de esta página. Para hacer girar este motor, tenemos que alimentar el motor con +5V usando el cable rojo y marrón y enviar señales PWM al cable de color naranja. Por lo tanto, necesitamos algo que pueda generar señales PWM para hacer que este motor funcione, este algo podría ser un temporizador 555 u otras plataformas de microcontroladores como Arduino, PIC, ARM o incluso un microprocesador como Raspberry Pie. Ahora, ¿cómo controlar la dirección del motor? Para entender eso, echemos un vistazo a la imagen que se muestra en la hoja de datos del MG-90S.



